ロボットのさまざまなコンポーネントが次のとおりであることを示すロボットの構造を考えてみましょう。
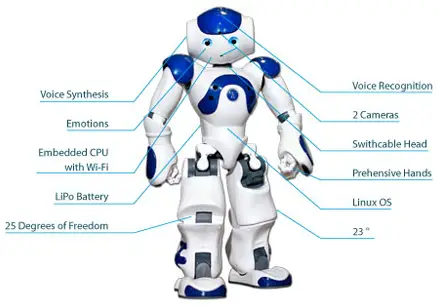
ロボット工学の主要なコンポーネントは次のとおりであると考えてください。
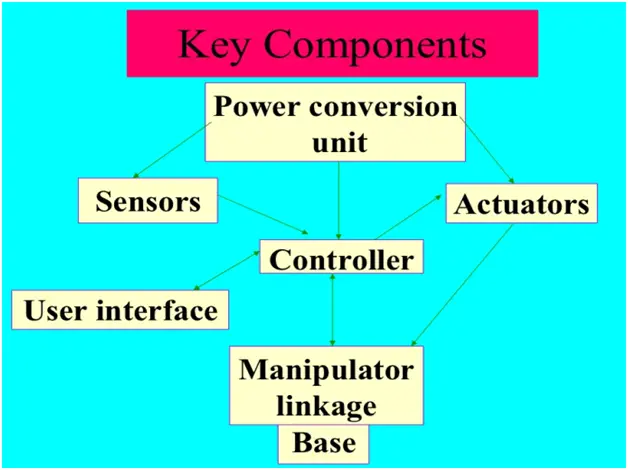
| 電源 - | ロボットへの動作電力は、バッテリー、油圧、太陽光発電、または空気圧の電源によって供給されます。
| アクチュエーター - | アクチュエーターは、ロボット内部で使用されるエネルギー変換デバイスです。アクチュエーターの主な機能は、エネルギーを動きに変換することです。
| 電動モーター (DC/AC)- | モーターは、電気エネルギーを同等の機械エネルギーに変換するために使用される電気機械部品です。ロボットでは、回転運動を提供するためにモーターが使用されます。
| センサー - | センサーはタスク環境に関するリアルタイムの情報を提供します。ロボットには、人間の指紋の接触受容体の機械的特性を模倣する触覚センサーが装備されており、視覚センサーは環境内の深さを計算するために使用されます。
| コントローラー - | コントローラーは、機械システムのすべての動きを調整するロボットの一部です。また、さまざまなセンサーを通じて周囲の環境からの入力も受け取ります。ロボットのコントローラーの心臓部は、入出力および監視デバイスとリンクされたマイクロプロセッサーです。コントローラからの指令により、各種コントローラ、アクチュエータ、アンプから構成されるモーションコントロール機構が作動します。

